The overall dynamics of a multibody system is actually a multi-scale problem because it depends a great deal on the local contact properties (coefficient of restitution, friction, roughness, etc). In this paper we found that the briefly presented force-based theory of plane dynamics for a multibody system with unilateral contacts was appropriate for simulating detailed multi-contact situations of rough contacting surfaces.
The focus of the paper is on a geometrically detailed description of rough surfaces. To achieve the run-in effect of the contacting surfaces under dynamical loads the contacting surfaces need to be re-shaped. For the re-shaping a wear model based on the local loss of mechanical energy under dynamical loads is presented.
The new ideas are presented for a numerical analysis of measuring the coefficient of friction at the rim of a wheel (rotating body). With the help of the analysis the experimentally observed change in the measured coefficient of friction of up to 30% for only slightly altered experimental conditions is explained.
~
See also related papers:
[On friction of the Graphite-Cooper Contact],
[Modelling and Analyzing the Dynamics of an electric-motor brush]~
Software used:
[Multibody Dynamics Symulator]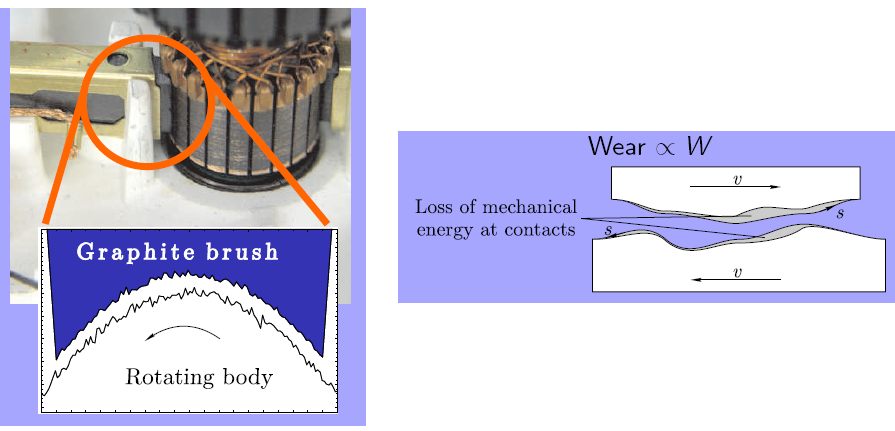
 download pdf
http://dx.doi.org/10.1007/s11071-005-9012-x
download pdf
http://dx.doi.org/10.1007/s11071-005-9012-x


