Laboratory for Dynamics of Machines and Structures
An advanced nonlinear model of a low-g mems accelerometer for a computer pen
J. Žumer,
D. Reynaerts and
M. Boltežar
Measurement, 2012, Volume 45, Issue 3, April 2012, Pages 459-468
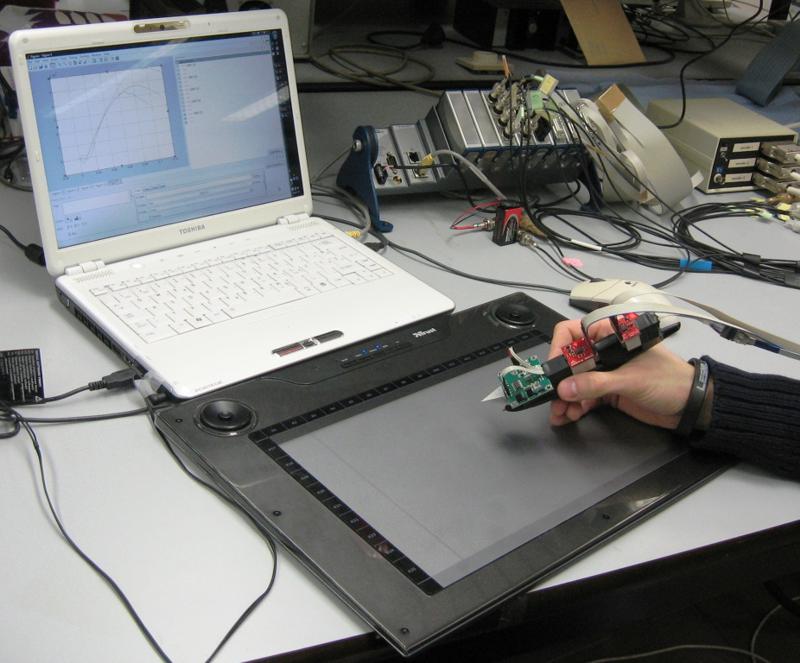
This paper presents an improvement in the gesture reconstruction for a computer pen using the inertial principle. The computer pen is equipped with a complete, miniaturized, six-degrees-of-freedom, inertial measurement unit in order to reduce the error of the pen’s orientation during the gesture stroke and to reduce the error of the calculated pen tip’s position on the piece of paper. The performance of the computer pen is improved by calibrating the MEMS accelerometer. The presented research focuses on the advanced modeling of the nonlinear voltage output of a triple-axis low-g MEMS accelerometer. The model considers the interacting influence of the low-g accelerations between the sensing axes in an arbitrarily oriented pen without any required knowledge about the underlying performance of the MEMS accelerometer. In combination with the attitude-compensation and zero-velocity-compensation techniques the positional accuracy of the pen’s tip on the paper is greatly improved.