Laboratory for Dynamics of Machines and Structures
Design principles for a single-process 3D-printed stacked dielectric actuators — Theory and experiment
T. Barši Palmić and
J. Slavič
International Journal of Mechanical Sciences, 2023
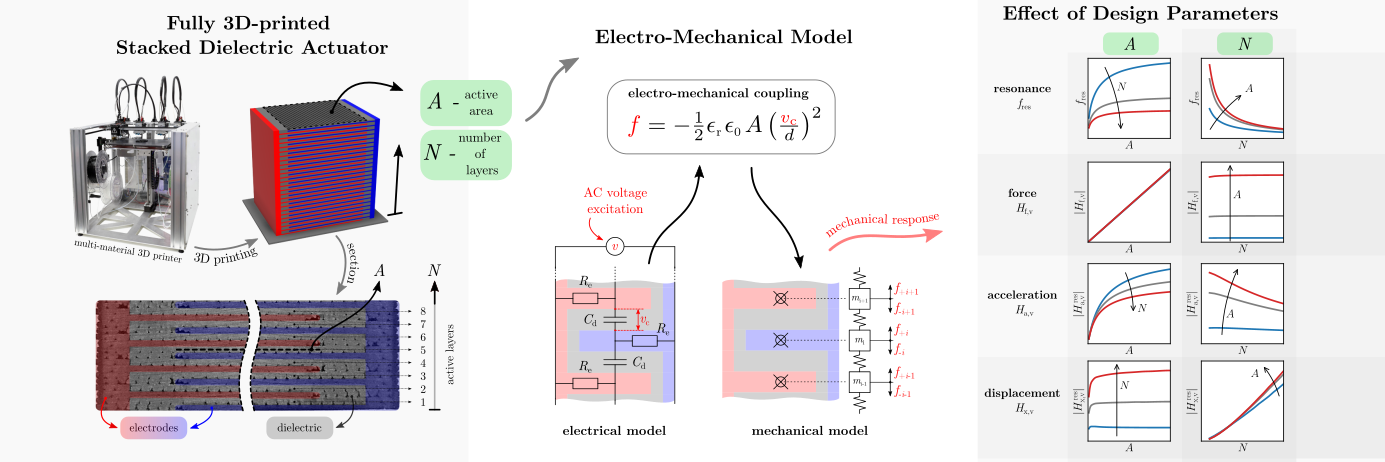
Fully 3D-printed smart structures have attracted a lot of research interest; new technologies, materials, and methods for 3D-printed functional structures such as sensors, actuators, generators, and batteries are being researched. Recently, a fully 3D-printed, dynamic dielectric actuator fabricated in a single process with multi-material thermoplastic filament extrusion was presented. However, the effects of design parameters on the dynamic electromechanical properties of the printed actuator were not yet researched. To achieve the required performance and dynamic properties of an individualized, 3D-printed actuator, the electromechanical properties must be related to the theoretical design parameters. This requires research into the properties of 3D-printed materials and the electromechanical modeling of the 3D-printed actuator. In this research, an analytical, electromechanical model is introduced, consisting of electrical and mechanical models, and electromechanical coupling. The model consists of basic electrical and dynamic lumped elements, which facilitates the reproducibility and extensibility of the model. The electrical and electromechanical model have been experimentally validated in a free-displacement and a blocked-force boundary condition. This research leads to the identification of design principles and the ability to customize and adapt the 3D-printed actuators to specific dynamic applications.
 download pdf
https://doi.org/10.1016/j.ijmecsci.2023.108128
download pdf
https://doi.org/10.1016/j.ijmecsci.2023.108128

