Laboratory for Dynamics of Machines and Structures
A review of continuous contact-force models in multibody dynamics
L. Skrinjar,
J. Slavič and
M. Boltežar
International Journal of Mechanical Sciences. Volume 145, September 2018, Pages 171-187
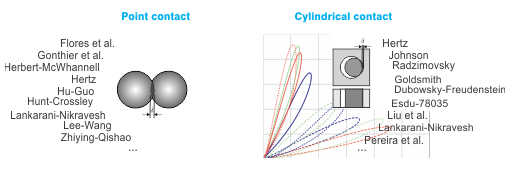
This is a review of well established and recently introduced contact-force models that are used in the dynamical analysis of multibody systems. In particular, two contact groups have been investigated: the general (point contact) and the cylindrical (line contact) models. For the point-contacts group, 20 different models are listed and a dozen are used in numerical simulations for comparison. While for the cylindrical-contacts group 10 models are listed and most of them are compared on the basis of results of numerical simulations.
Basic numerical experiments are used to compare the evolution of the contact force during the contact process for the presented general contact-force models with energy dissipation and cylindrical contact-force models with and without energy dissipation at the contacts. The effects of the different hysteresis-damping models on the presented general contact-force models are compared. Furthermore, the cylindrical contact-force models are compared in terms of the contact force and the hysteresis damping in the contact.
The objective of this review is to offer basic guidelines for the selection of the proper contact formulation for a specific application in the analysis of multibody dynamics with continuous contacts-impact events. Twenty general contact-force models are presented in this research and more than 10 cylindrical continuous contact-force models are presented and compared. Furthermore, a hysteresis-damping effect in cylindrical contact-force models is researched and presented.
 download pdf
http://doi.org/10.1016/j.ijmecsci.2018.07.010
download pdf
http://doi.org/10.1016/j.ijmecsci.2018.07.010



