Laboratory for Dynamics of Machines and Structures
Minimization of the positional errors for an accurate determination of the kinematic parameters of a rigid-body system with miniature inertial sensors
J.Žumer,
J.Slavič and
M. Boltežar
Mechanism and Machine Theory, Volume 81, November 2014, Pages 193-208
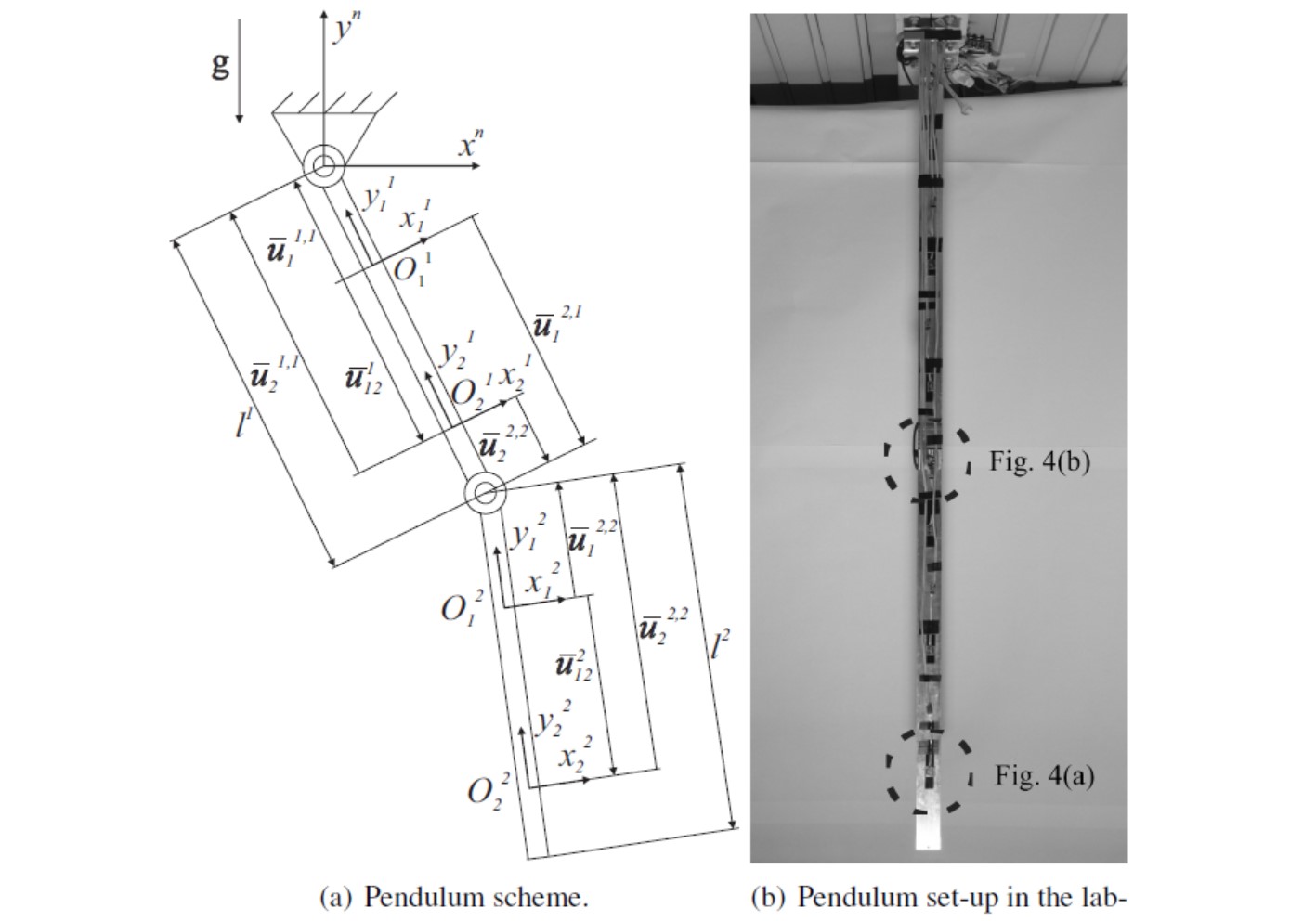
This paper presents an approach to minimize and control the error of the kinematic parameters of the space-constraint rigid-body system by using inertial micro-electro-mechanical sensors (MEMS). We analyze the error propagation when the kinematic joint constraints are observed for a sensor-fusion update in the kinematic model because of the uncertain position of the inertial sensors. The minimization of the errors of the kinematic parameters comes from applying multiple inertial units on every rigid body with the controlled input positional error between each inertial unit. The analytical approach proposes the inclusion of the position vectors from the inertial units to the kinematical joints into the state vector that consists of the observed kinematical and sensor parameters. A Kalman-filtering procedure is used to observe the state vector and, additionally, the adaptive estimation of the position vectors from the inertial units to the kinematic joints or constraints is presented in order to achieve the optimum performance of the filter. The analytical approach is experimentally validated on a pendulum mechanism, where the improved performance of the proposed approach is confirmed.
 download pdf
http://dx.doi.org/10.1016/j.mechmachtheory.2014.07.008
download pdf
http://dx.doi.org/10.1016/j.mechmachtheory.2014.07.008



